Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.
Волновое управление
Полношаговый — в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
Полношаговое управление
Полушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
Полушаговое управление
Для более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
Схема Н-моста
Как видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
Подключение через контроллер однополярного шагового двигателя
Популярные схемы управления ШД
Схема управления от контроллера с дифференциальным выходом
Является одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
Схема управления от контроллера с выходом типа «открытый коллектор»
В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Виды шаговых двигателей по типу ротора:
После этого ротор повернется и будет стараться принять одно из следующих положений равновесия. Для устранения колебаний момента при работе двигателя в полушаговом режиме можно снижать ток в те моменты, когда включены две фазы.
Соответственно, в режиме удержания поскольку используются 8 разрядов ЦАП , максимальный ток составит 1 А.
Упрощенная схема коммутатора шагового двигателя без реверса
Еще раз обращаю внимание: при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть необходимо закладываться на номинальный ток схемы питания, равный удвоенному максимальному току обмоток при выбранном напряжении питания. Из-за этих ограничений микрошаговый режим используется в основном для обеспечения плавного вращения особенно на очень низких скоростях , для устранения шума и явления резонанса.
Зависимость момента от угла поворота ротора для двух запитанных обмоток
Обычно у них четыре вывода, две обмотки.
В полношаговом режиме с двумя включенными фазами положения точек равновесия ротора смещены на пол-шага. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов рис.

Назначение этих диодов — гасить ЭДС самоиндукции, возникающую при выключении управляющих ключей. При включени тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Да и в современной бытовой технике, автомобилях, промышленном оборудовании коллекторные двигатели распространены достаточно сильно.
Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Но такой ток от микросхем серии 74HCхх забрать невозможно, поэтому потребуются дополнительные драйверы.
Обеспечивает паспортное значение электрических характеристик. Драйверы делятся на две категории: Повторяющие форму сигналов. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Магнитный гистерезис приводит к тому, что магнитный поток зависит не только от тока обмоток, но и от предыдущего его значения. С точки зрения автора статьи, самым оптимальным для управления коммутацией обмоток двигателей небольшой мощности является использование подходящих по току и сопротивлению открытого канала RDC ON MOSFET, но с учетом рекомендаций, описанных выше.
Шаговый двигатель. Micro Step Driver. PLC Omron. Подключение,программирование. (Часть 1)
Шаговая частота вращения и частота импульсов
Так как частота вращения у ШД фактически представляет собой количество шагов в единицу времени, вместо термина «частота вращения» в специализированной литературе нередко можно встретить определение «шаговая частота вращения». Перед тем как подключить электродвигатель, об этих нюансах нужно обязательно прочесть.
Так как у большинства шаговых двигателей эта частота равна количеству управляющих импульсов, не стоит удивляться необычному ее обозначению в технических справочниках. Точнее, для подобных моторов единицей измерения нередко является герц (Гц).

При этом важно понимать, что шаговая частота вращения реального числа оборотов ротора двигателя ни в коем случае не отражает. Специалисты считают, что нет никакой причины не использовать в описании шаговых двигателей все то же количество оборотов в минуту, которое применяется при описании технических характеристик обычных электродвигателей
Соотношение между реальной частотой вращения и ее шаговым аналогом вычисляется по следующей формуле:
n = 60f/S, где n – частота вращения, выражается в оборотах в минуту; f – шаговая частота вращения; S – число шагов.
Виды шаговых двигателей
Существует несколько разных моделей шаговых двигателей. Если конструкция устройства предусматривает наличие постоянного магнита, принцип работы основан на притяжении или отталкивании статором и ротором электромагнитного мотора. В переменно-шаговом движке ротор изготавливается из железа. Минимально допустимое отталкивание в нем происходит при наименьшем зазоре, что обеспечивает притяжение точек ротора к полюсам магнитного статора. В механизмах гибридного типа оба вышеприведенных принципа сочетаются и дополняют друг друга. Из-за сложности конструкции и изготовления такие приборы стоят дороже, чем остальные модели.










Чаще всего в быту и на производстве применяются двухфазные шаговые двигатели. В зависимости от типа обмотки электромагнитных катушек они подразделяются на:
- униполярные;
- биполярные.
Механизмы первого типа оснащены одной обмоткой. Каждая фаза определяется центральным магнитным краном. При включении определенной секции обмотки обеспечивается нужное направление магнитного поля. Такая конструкция предусматривает работу магнитного полюса без дополнительного переключения, что обеспечивает предельно простую коммутацию цепи, равно как и направления тока. Для работы движка (с учетом фазного переключения) обычно достаточно трех проводов на фазу и шести для выходного сигнала. Микроконтроллер используется для активирования транзистора в нужной последовательности (она определяется программой).
Для подключения обмоток соединительные провода должны прикасаться к постоянным магнитам двигателя. При соединении клемм катушки вал проворачивается с трудом. Поскольку общий провод длиннее, чем провод, соединяющий катушки, сопротивление между торцами проводов и торцами катушек в два раза больше сопротивления между торцом катушки и общим проводом.
В механизмах второго типа есть только одна фазовая обмотка. Управляющая схема такого движка обычно сложнее, так как ток в обмотку поступает при помощи магнитного полюса переломным образом. Два провода на фазу не являются общими.
Трехфазный шаговый двигатель устанавливается на фрезерных станках с ЧПУ, запускаемых с компьютера, и транспортных средствах, в которых используется дроссельная заслонка.
Конструкция и управление шаговым двигателем
В нашем простом примере шагового двигателя с переменным сопротивлением выше, двигатель состоит из центрального ротора окружен четырьмя электромагнитными катушками, помеченных A, B, C и D. Все катушки с одной и той же буквой соединены вместе, так что при подаче питания, скажем, катушек, помеченных буквой A, магнитный ротор выравнивается с этим набором катушек.
Подавая мощность на каждый набор катушек, в свою очередь, можно заставить ротор вращаться или «переходить» из одного положения в другое на угол, определяемый конструкцией угла его шага, и при последовательном возбуждении катушек ротор будет производить вращение (движение).
Драйвер шагового двигателя управляет как углом шага, так и скоростью двигателя, запитывая полевые катушки в установленной последовательности, например, « ADCB, ADCB, ADCB, A… » и т.д., ротор будет вращаться в одном направлении (вперед) и посредством при изменении последовательности импульсов на « ABCD, ABCD, ABCD, A… » и т. д. ротор будет вращаться в противоположном направлении (назад).
Таким образом, в нашем простом примере, приведенном выше, шаговый двигатель имеет четыре катушки, что делает его 4-фазным двигателем с числом полюсов на статоре восемь (2 x 4), которые расположены с интервалом 45 градусов. Число зубьев на роторе составляет шесть, которые расположены на расстоянии 60 градусов друг от друга.
Тогда есть 24 (6 зубьев х 4 катушек) возможных положений или «ступеней», чтобы ротор совершил один полный оборот. Следовательно, вышеуказанный угол шага равен: 360 o / 24 = 15 o .
Очевидно, что чем больше зубьев ротора и / или катушек статора, тем лучше контроль и меньший угол шага. Кроме того, при подключении электрических катушек двигателя в различных конфигурациях возможны полные, половинные и микрошаговые углы. Однако для достижения микроперехода шаговый двигатель должен приводиться в действие (квази) синусоидальным током, который дорог в реализации.
Также возможно контролировать скорость вращения шагового двигателя, изменяя временную задержку между цифровыми импульсами, подаваемыми на катушки (частоту), чем больше задержка, тем медленнее скорость для одного полного оборота. Подавая на двигатель фиксированное количество импульсов, вал двигателя вращается на заданный угол.
Преимущество использования импульса с задержкой по времени заключается в том, что не требуется никакой дополнительной обратной связи, поскольку путем подсчета количества импульсов, подаваемых на двигатель, конечное положение ротора будет точно известно. Эта реакция на заданное количество цифровых входных импульсов позволяет шаговому двигателю работать в «системе с разомкнутым контуром», что делает его более простым и дешевым в управлении.
Например, предположим, что наш шаговый двигатель имеет угол наклона 3,6 градуса на шаг. Чтобы повернуть двигатель на угол, скажем, 216 градусов, а затем снова остановиться в требуемом положении, потребуется всего: 216 градусов / (3,6 градуса / шаг) = 80 импульсов, приложенных к катушкам статора.
Имеется много интегральных схем контроллера шагового двигателя, которые могут контролировать скорость шага, скорость вращения и направление двигателя. Одним из таких контроллеров является SAA1027, который имеет все необходимые встроенные счетчики и преобразователи кода и может автоматически подключать 4 полностью контролируемых мостовых выхода к двигателю в правильной последовательности.
Направление вращения также может быть выбрано вместе с одношаговым режимом или непрерывным (бесступенчатым) вращением в выбранном направлении, но это накладывает некоторую нагрузку на контроллер. При использовании 8-битного цифрового контроллера возможны также 256 микрошагов за шаг.
Об энкодерах и драйверах, подключениях
Специальные драйверы нужны для того, чтобы управлять устройством. Они подключаются к LTP портам у персональных компьютеров. От программы идёт генерация сигналов, которые потом принимаются драйверами. После чего двигатель и получает определённые команды. Подача тока на обмотки позволяет организовать работу всего устройства. Программное обеспечение облегчает контроль:
- По двигательной величине.
- Для скоростей.
- По траекториям.
Драйвер – это блок, отвечающий за управление всем двигателем. Формирование управляющего сигнала происходит при участии специального контроллера. Что предполагает подключение к устройству сразу четырёх выводов шагового двигателя. С блока питания идёт энергия, отрицательная и положительная, она и соединяется с моторами для дальнейшей работы.
С контроллера ПУ сигналы идут к драйверу. Далее организуется управление процессом, во время которого переключаются ключи, составляющие схему с питающим напряжением. Последнее идёт с блока питания, на двигатель, проходя по ключам.

Серводвигатели
В то время как коллекторные двигатели постоянного тока и бесколлекторные двигатели разработаны для регулируемой скорости, серводвигатели разработаны для точного позиционирования.
 Оценка характеристик серводвигателей
Оценка характеристик серводвигателей
Серводвигатели оснащены встроенным аппаратным обеспечением для определения положения, что позволяет контроллеру серводвигателя измерять точное угловое положение вала двигателя, также называемое углом поворота. Сочетание точного позиционирования и высокого крутящего момента, предлагаемое серводвигателями, делает их отличным выбором для ряда проектов, связанных с робототехникой.
 Примеры использования серводвигателей в проектах
Примеры использования серводвигателей в проектах
Шагающий робот
Если вы создаете шагающего робота, имеет ли он две, четыре, шесть или даже большее количество ног, серводвигатели почти наверняка будут выполнять основную работу в вашем проекте.
 В шагающих роботах серводвигатели действуют как суставы
В шагающих роботах серводвигатели действуют как суставы
В шагающих роботах серводвигатели выступают в качестве суставов (и немного похожи на мышцы, но анатомическая аналогия здесь немного нарушается). Компьютер, на котором работает ваш робот, будет использовать обратную кинематику для вычисления угла, который должен принимать каждый сустав, чтобы выставить робота в определенном положении. Серводвигатели позволяют контроллеру точно управлять углом каждого сустава робота.
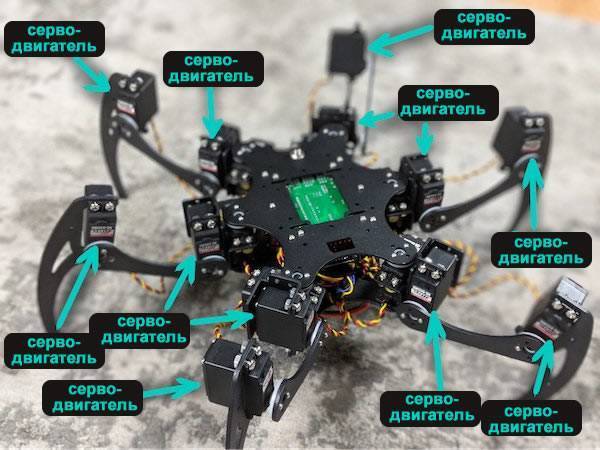 Если вы строите шагающего робота, то, скорее всего, вы будете использовать много серводвигателей!
Если вы строите шагающего робота, то, скорее всего, вы будете использовать много серводвигателей!
Роботизированные руки
Серводвигатели также полезны для создания роботизированных рук (роботов-манипуляторов). Высокая точность позиционирования, предлагаемая серводвигателями, позволяет микроконтроллеру устанавливать конечный исполнительный механизм манипулятора с высокой степенью точности.








 Это робот-манипулятор uArm Metal, работающий на сервоприводах
Это робот-манипулятор uArm Metal, работающий на сервоприводах
Серводвигатели также обеспечивают высокий крутящий момент на низких скоростях, благодаря редуктору между двигателем и выходным валом, что позволяет роботам-манипуляторам поднимать тяжелые предметы.
Наконец, сервопривод будет сопротивляться внешним силам, пытающимся изменить положение манипулятора. Например, если вы соберете роботизированную руку и заставите ее пройти дальше точки, которую ищет микроконтроллер, то, как только вы перестанете прикладывать усилие к манипулятору, серводвигатели вернутся в исходное положение.
Шаговые двигатели (описанные в следующем разделе), напротив, не имеют механизма для определения того, изменяют ли их положение внешние силы.
Рулевое управление для радиоуправляемых машин
В радиоуправляемых машинах серводвигатели обычно используются для рулевых механизмов. Поскольку сервоприводы могут быть точно установлены в нужное положение, а затем возвращены в центральное положение, они идеально подходят для рулевого управления. Серводвигатели позволяют управлять всеми видами радиоуправляемых проектов: от рулевых реек на радиоуправляемых машинках, до рулей направления на лодках, до управляющих поверхностей на самолетах.
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
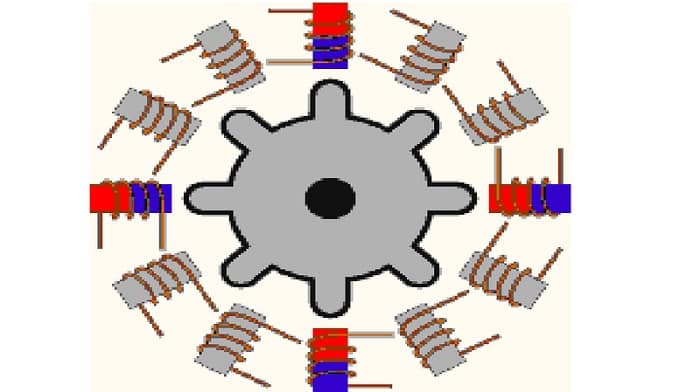 С переменным магнитным сопротивлением
С переменным магнитным сопротивлением
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
 С постоянным магнитом
С постоянным магнитом
Гибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость. При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
 Униполярный ШД
Униполярный ШД
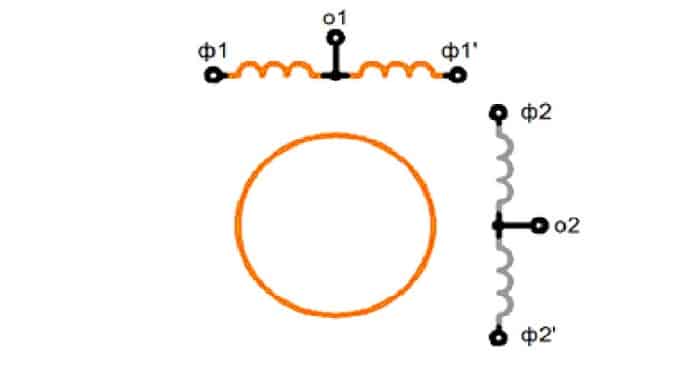
Для использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
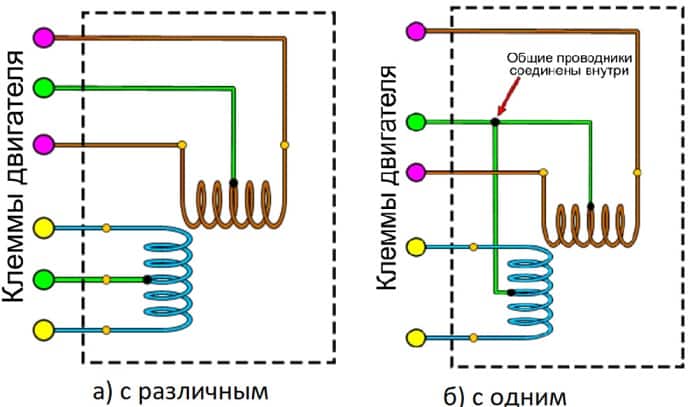 Схема а) с различными, б) с одним выводом
Схема а) с различными, б) с одним выводом
Биполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
 Биполярный шаговый двигатель
Биполярный шаговый двигатель
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
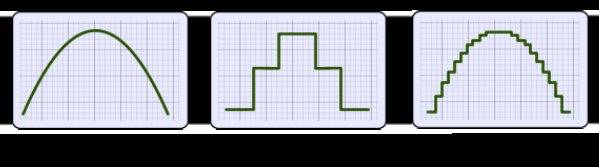
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.










Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Принцип работы шаговых двигателей
Представьте себе двухполюсный постоянный магнит на валу двигателя – это ротор, окруженный замкнутым магнитопроводом с четырьмя обмотками — статор. Вернее это две обмотки AB и CD с половинками, расположенными на противоположных полюсах статора.
Подключили к источнику напряжения обмотку AB (полярность + -) как показано на рисунке. Ток в этой обмотке вызовет появление магнитного поля статора с полюсами сверху N, снизу S. Как известно разноименные полюса магнитов притягиваются. В результате ротор (постоянный магнит) займет положение, в котором оси магнитных полей ротора и работающих полюсов статора совпадают. Механическое положение будет устойчивым. При попытке сдвинуть ротор, возникнет сила, возвращающая его назад.
Теперь снимем напряжение с обмотки AB и подадим на обмотку CD (полярностью + -). Ток в обмотке CD вызовет магнитное поле с горизонтальными полюсами, слева S, справа N. Магнитное поле делает все, чтобы магнитный поток замкнулся по минимальному пути. Ротор повернется в положение указанное на рисунке. Механическое положение ротора опять устойчивое. Это был первый шаг двигателя. В нашем случае он равен одной четвертой оборота.
Отключаем обмотку CD и подаем напряжение опять на обмотку AB, но уже в другой полярности (- +). Опять магнитное поле статора повернется на 90°, а за ним и ротор.
Еще одна коммутация AB — отключаем, CD — подключаем (полярность — +) и ротор совершает еще один шаг на одну четвертую окружности. Следующая коммутация (с которой мы начали) вернет ротор в исходное положение. Мы сделали полный поворот за 4 шага. Если продолжить переключение фаз, ротор будет вращаться с частотой, пропорциональной частоте переключения фазных обмоток. Если коммутировать фазы в противоположной последовательности – крутиться в обратном направлении, прекратить коммутацию — остановится.
Биполярные и униполярные шаговые двигатели
Это был биполярный шаговый двигатель. Биполярный двигатель имеет по одной обмотке для каждой фазы. На предыдущих рисунках это обмотки AB и CD. Для изменения магнитного поля должна обеспечиваться сложная коммутация обмоток. Каждая обмотка: • отключается от источника напряжения, • подключается в прямой полярности • подключается с противоположной полярностью.
Для такой коммутации требуется сложный мостовой драйвер. Примером такого устройства является микросхема L298N. Микросхема обеспечивает ток коммутации до 2 А. Если нужны большие токи, то задача управления биполярным двигателем еще усложняется.
Существует другой способ изменения магнитного поля в статоре с гораздо более простой схемой коммутации. Это применение двигателя с униполярными обмотками. Схема двух фазного шагового двигателя с униполярными обмотками и последовательность коммутаций обмоток выглядит так.
У всех четырех обмоток один вывод подключен к плюсовому выводу источника питания. А другие выводы A,B,C,D последовательно коммутируются к минусовому сигналу. Соответствующие обмотки создают магнитное поле, и ротор поворачивается вслед за ним.
Для коммутации обмоток таким способом достаточно четырех ключей, замыкающих обмотки на землю. Ключи часто управляются непосредственно с выводов микроконтроллеров. Иногда средние выводы обмоток конструктивно объединены внутри двигателя, иногда выводятся все выводы отдельно. Кстати, это не повод называть двигатель четырехфазным. Все равно он будет двухфазным.
Биполярный двигатель обеспечивает, при тех же размерах, больший крутящий момент, по сравнению с униполярным. Оно и понятно. Одновременно в униполярном двигателе работает только одна обмотка, вместо двух. Выигрыш в моменте у биполярного составляет около 40%. Зато, если нет необходимости использовать двигатель на полную мощность, униполярным двигателем гораздо проще управлять.